Hand gesture recognition, using graph neural network

هدف این پروژه، پیاده سازی یک مدل تشخیص علائم دست با استفاده از یک شبکه عصبی گراف هست.
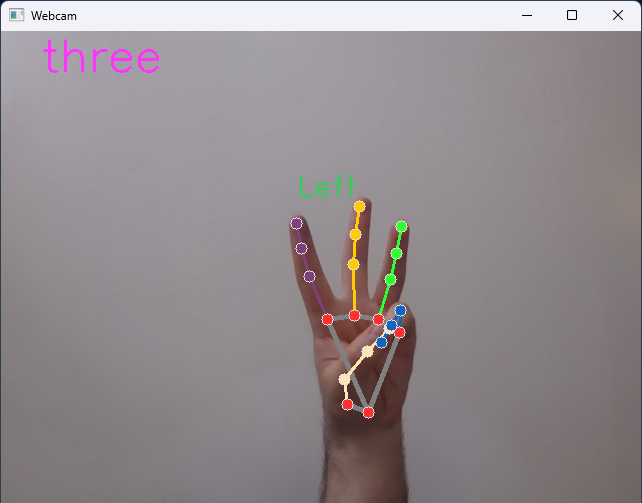
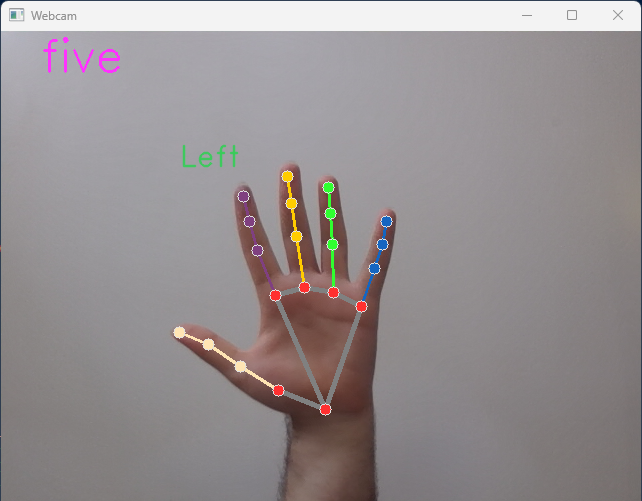
دیتاست مورد نظر برای این پروژه، شامل تقریبا 7150 عدد عکس از 8 عدد علائم دست هست. از آنجایی هدف پروژه استفاده از شبکه عصبی گرافی هست، به داده های گرافی نیاز داریم. برای تبدیل عکس به گراف، از MediaPipe Hand Landmarker استفاده شد. ورودی یک عکس از دست را می گیرد و مختصات نقاط زیر را از روی دست تشخیص می دهد.
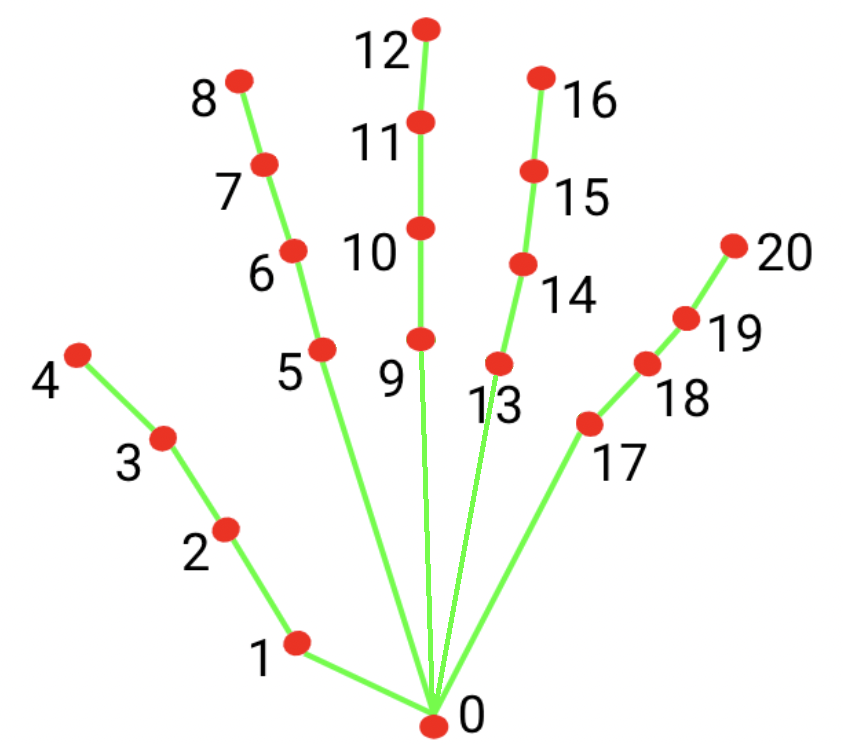
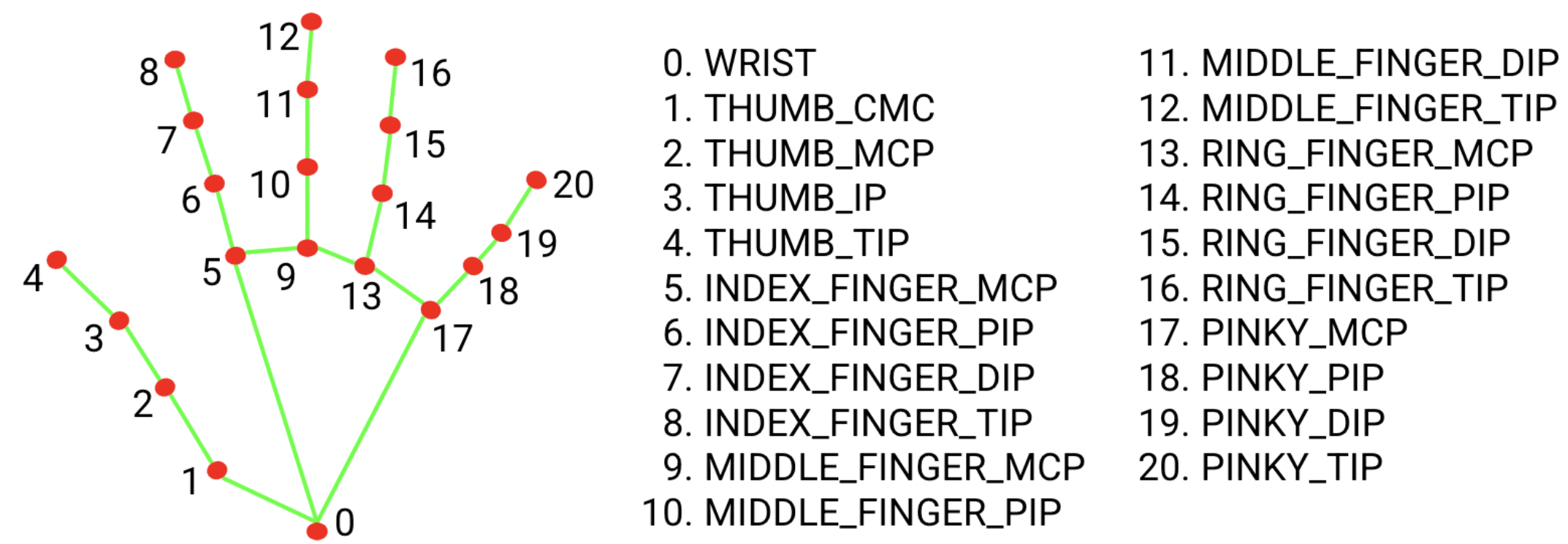 هر گراف شامل راس و یال هست. هر راس نیز می تواند ویژگی هایی داشته باشد. در اینجا هر نقطه، راس گراف محسوب می شود و مختصات هر نقطه، ویژگی های راس هستند. یال ها هم مانند عکس بالا هست با این تفاوت که بعضی از یال ها را تغییر داده که بیشتر به اسکلت دست انسان شبیه باشد.
هر گراف شامل راس و یال هست. هر راس نیز می تواند ویژگی هایی داشته باشد. در اینجا هر نقطه، راس گراف محسوب می شود و مختصات هر نقطه، ویژگی های راس هستند. یال ها هم مانند عکس بالا هست با این تفاوت که بعضی از یال ها را تغییر داده که بیشتر به اسکلت دست انسان شبیه باشد.
edges = [
[0, 1], [0, 5], [0, 9], [0, 13], [0, 17],
[1, 0], [1, 2], [2, 1], [2, 3], [3, 2],
[3, 4], [4, 3], [5, 0], [5, 6], [6, 5],
[6, 7], [7, 6], [7, 8], [8, 7], [9, 0],
[9, 10], [10, 9], [10, 11], [11, 10], [11, 12],
[12, 11], [13, 0], [13, 14], [14, 13], [14, 15],
[15, 14], [15, 16], [16, 15], [17, 0], [17, 18],
[18, 17], [18, 19], [19, 18], [19, 20], [20, 19]
]
edges = np.array(edges).T.astype('int64')
for i in range(len(train_x)): x = train_x[i][0][0] y = train_x[i][0][1] z = train_x[i][0][2] for j in range(len(train_x[i])): train_x[i][j][0] = train_x[i][j][0] - x train_x[i][j][1] = train_x[i][j][1] - y train_x[i][j][2] = train_x[i][j][2] - zبرای ساخت و اموزش شبکه های عصبی گرافی، pytorch geometric یکی از مورد استفاده ترین کتابخانه ها هست. یک نمونه پیلدی سازی مدل، به شکل زیر است. از چند لایه Convolutional Layers برای message passing، یک لایه global mean pool برای به دست اوردن ویژگی کل گراف از روی راس ها، و یک linear برای کلاس بندی (classify) کردن نتیجه هست.
from torch.nn import Linear import torch.nn.functional as F from torch_geometric.nn import GCNConv from torch_geometric.nn import global_mean_pool class GCN(torch.nn.Module): def __init__(self): super(GCN, self).__init__() self.conv1 = GCNConv( , ) self.conv2 = GCNConv( , ) self.conv3 = GCNConv( , ) self.lin = Linear( , 8) self.double() def forward(self, x, edge_index, batch): x = self.conv1(x, edge_index) x = x.relu() x = self.conv2(x, edge_index) x = x.relu() x = self.conv3(x, edge_index) x = x.relu() x = self.conv4(x, edge_index) x = global_mean_pool(x, batch) x = F.dropout(x, p=0.5, training=self.training) x = self.lin(x) return x
مقایسه graph neural network با convolutional neural network:
با اینکه دیتاست gnn و cnn یکی بودند، اما بعد از تغییر داده ها به داده های گرافی، حجم داده های گرافی 190 برابر کمتر از حجم داده های اولیه شد. فرایند آموزش gnn با 170 ایپاک 5 – 10 دقیقه شد، در حالی که فرایند آموزش برای cnn بیشتر از یک ساعت می باشد. اما با این حال مدل cnn دقت بهتری نسبت به gnn داشت. مدل gnn استفاده شده یک مدل ساده بوده و جای پیشرفت و بهبود دارد و می تواند به دقت بهتری برسد.